Using various algorithms to perform SLAM with a monocular camera and visual markers.

ArUco markers are a type of fiducial marker commonly used in computer vision applications, especially because they are built into OpenCV. Since their size is known, their corners can be used with the PnP algorithm to estimate their pose in the camera frame. Additionally, ArUco markers individually encode an ID. Together, these properties make them ideal for SLAM applications.
SLAM stands for Simultaneous Localization and Mapping. This means that the system can localize itself in an environment while simultaneously building out its understanding of that environment. This project detects the position and orientation of ArUco markers in a video feed, inserts those markers into a map, and then uses various methods to optimize the estimates for both the camera and marker positions. In the video above, all markers are placed randomly; before the first frame is processed, there is no information about their positions.
Why is this important? SLAM is a fundamental problem in robotics and computer vision. In fact, Kiva Systems (now Amazon Robotics) uses a marker-based system similar to the one implemented here to localize their robots as they navigate through warehouses.
Likewise, quaternions are not vectors, so we can't use the additive updates of the EKF. Thanks to Michael from Shield AI for pointing this out to me. Instead, we will use the Multiplicative EKF (MEKF) in parallel for orientation. You can find a discussion of it in NASA's Navigation Filter Best Practices as well as a great, simple explanation here [4][5]. You'll find below that the orientation is represented by an accumulation quaternion and a small-angle correction parameterized by 3 local attitude errors.
The key components of the Extended Kalman Filter are as follows:
-
State Vector: the 3D pose (tanslation and quaternion) of the camera, along with the 3D position of each ArUco marker (all in the map frame):
- camera:
$x_{cam}, y_{cam}, z_{cam}, qw_{cam}, qx_{cam}, qy_{cam}, qz_{cam}, ex_{cam}, ey_{cam}, ez_{cam}$
- marker
$i$ :$x_{mi}, y_{mi}, z_{mi}$
- Putting the components together, the state vector will have be
$3n + 10$ dimensions, for$n$ landmarks
- camera:
-
Measurement Vector: the 3D position of each ArUco marker in the camera frame:
${}^{cam}x_{mi},{}^{cam}y_{mi},{}^{cam}z_{mi}$
-
State Transition: For the motion model, we use a moving average of the last
$n$ displacements to predict the camera's position motion. Since markers are static, we do not update their state:$X_{k|k-1} = X_{k-1|k-1} + \frac{X_{k-1|k-1} - X_{k-n|k-n}}{n}$
-
Measurement Model: in order to model what we will measure, we get the displacement between the landmark and the camera positions (
$X$ ), and then rotate it to put it in the camera frame:${}^{cam}X_{marker} = {}^{cam}R_{map} \cdot ({}^{map}X_{marker} - {}^{map}X_{cam})$
There is an excellent explanation by Cyrill Stachniss for a similar, 2D example that can be found here [1].
python3 run_slam.py --filter ekf


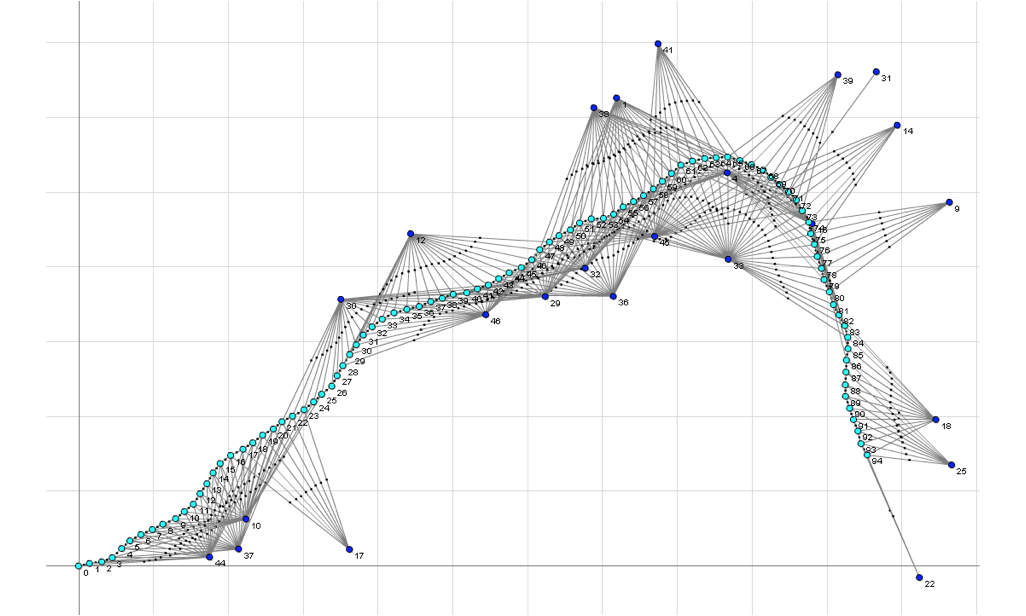
Image credit: GTSAM [2]
A factor graph optimizes the joint probability:
Where:
-
$X$ : the camera poses and the landmark positions. -
$Z$ : the measured landmark poses in the camera frame. -
$\phi_i$ : the factor that relates one camera pose to the next as well as each camera pose to the landmark that were seen at that time.
In other words, we can estimate the camera and landmark positions by optimizing the posterior probability.
The factor graph does not currently use a motion model; it simply uses the last position with a large uncertainty. I tried the motion model, but there was a large instability.
My implementation leverages GTSAM with the ISAM2 solver, following the postulation above. It reconstructs the graph at each timestep, maintaining conciseness while also accounting for both the local environment and historical constraints.
python3 run_slam.py --filter factorgraph
Visualization
This is the same as the gif shown at the top of the README.
Due to possible ambiguities in ArUco orientation estimation, only marker
positions are used (hence why they are represented as points). These
orientation ambiguities can be seen in the video (z axis flipping) and are
discussed more thoroughly in
this OpenCV github issue. In
the future, I may opt to use the stable x and y dimensions as part of the
state for better results.
sudo apt-get install mesa-utils libglew-dev
git clone --recursive https://github.com/yishaiSilver/aruco-slam.git
cd aruco-slam
pip install -r requirements.txt
cd thirdparty/pangolin
mkdir build
cd build
cmake .. -DPython_EXECUTABLE=`which python` -DBUILD_PANGOLIN_FFMPEG=OFF
make -j8
cd ../..
python pangolin_setup.py install
cd filterpy
python setup.py install
cd ../..
Please ensure that you have properly calibrated your camera.
- ArUco Detection, Pose Estimation
- Moving Average Motion Model (EKF)
- EKF
- Non-Additive Quaternions in EKF (MEKF)
- UKF
- Iterative EKF
- Factor Graph
- Particle Filter
- 3D Visualization
- Map Saving
- Map Loading
- Trajectory Saving
- Partial, Stable Angle State for Landmarks
Nice To haves:
- Ground Truth Comparison
- Duplicate Marker ID Handling
- Non-Static Landmark Tracking
- Orientation Ambiguity Resolution
[1] Cyrill Stachniss. (2020, October 2). EKF-SLAM (Cyrill Stachniss). YouTube. https://www.youtube.com/watch?v=X30sEgIws0g
[2] Dellaert, F., & GTSAM Contributors. (2022, May). borglab/gtsam (Version 4.2a8) [Software]. Georgia Tech Borg Lab. https://doi.org/10.5281/zenodo.5794541
[3] uoip. (2018, January 23). Pangolin. GitHub. Retrieved December 6, 2024, from https://github.com/uoip/pangolin
[4] Carpenter, J. R., & D’souza, C. N. (2018). Navigation filter best practices (No. NF1676L-29886).
[5] Hampsey, Matthew. “The Multiplicative Extended Kalman Filter.” Github.io, 2020, matthewhampsey.github.io/blog/2020/07/18/mekf. Accessed 6 Feb. 2025.